{kind=link}
Description
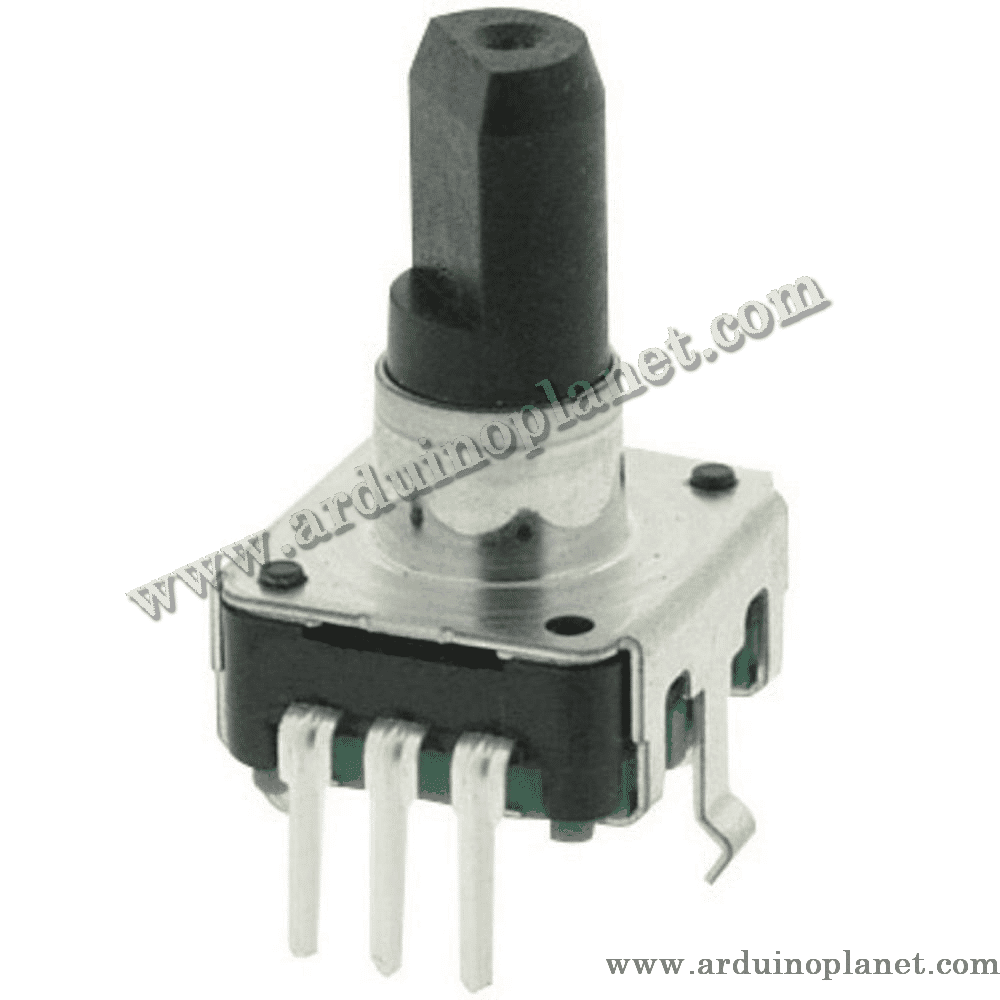
Encodeur Rotatif
Un Encodeur rotatif à un nombre définit de positions pour une révolution complète (un tour de 360 degrés). On peut sentir un clic à chaque pas lorsqu’on tourne le curseur du potentiomètre. L’encodeur possède 30 pas, soit une résolution de 12 degrés.
Il est également équipé d’un bouton que l’on actionne en appuyant sur l’axe. Le signal est récupéré sur la broche repérée SW. On pourra s’en servir pour faire un Reset de la position (au démarrage), allumer un afficheur….
Même si on appel ce composant un potentiomètre, le principe de fonctionnement en est tout autre. Ici on ne mesure pas la valeur d’une résistance variable, on mesure des signaux logiques sur deux broches digitales de l’Arduino. Par exemple, lorsque l’on est sur une position, A et B ont le même niveau logique (0 ou 1). Si on tourne dans le sens horaire, le signal d’état A change avant B, et inversement lorsque tourne dans le sens horaire.
Mots clés: encoder, rotary, potentiometer