{kind=link}
Description
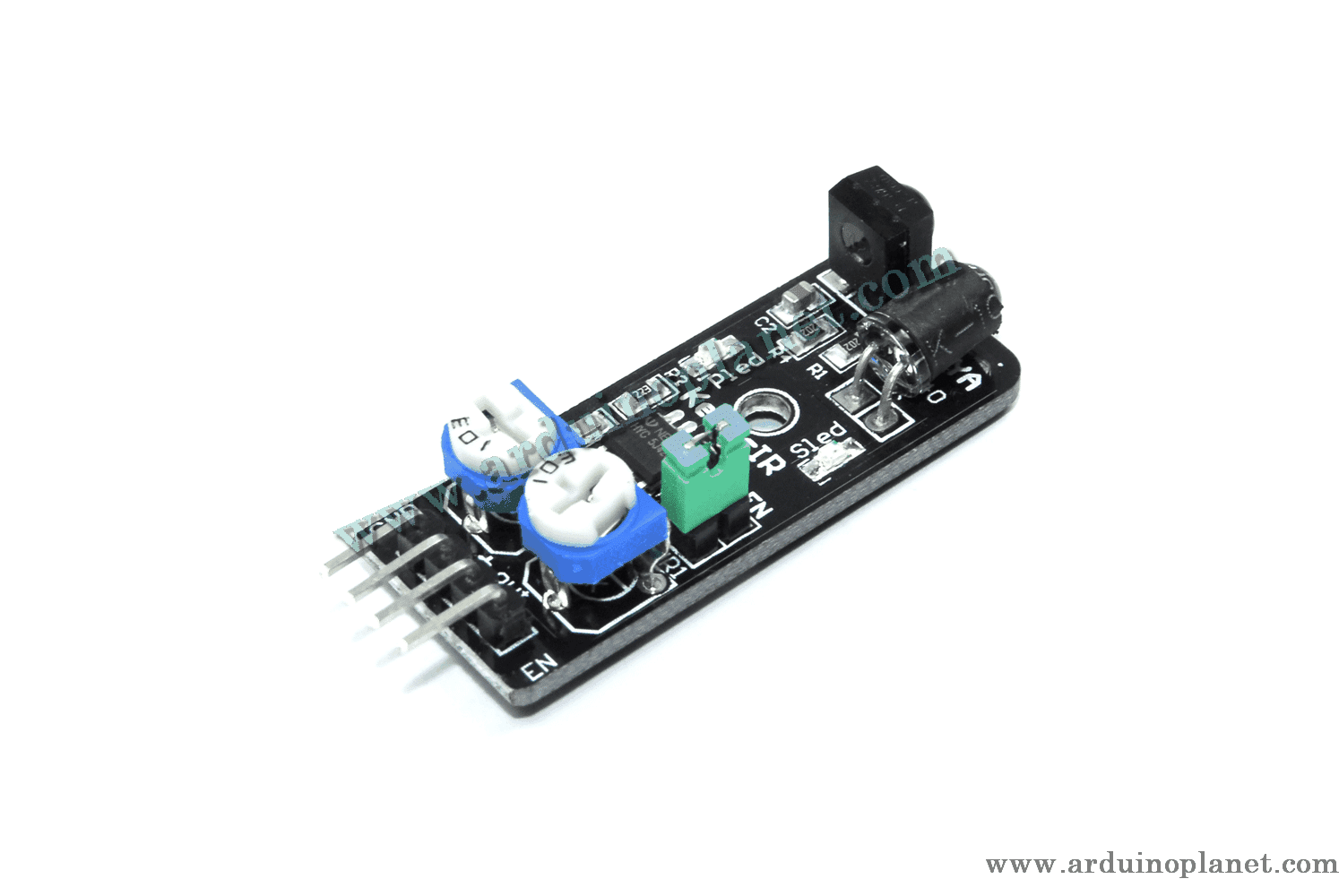
Module Détecteur Smart D’obstacle KY-032
Ce module est un détecteur d’obstacle, une diode infrarouge émet un signal et en cas de présence d’un obstacle, un récepteur infrarouge reçoit le signal réfléchi par cet obstacle. La portée de détection est réglable.
Ce détecteur d’obstacle peut être utilisé pour construire un robot autonome détecteur d’obstacles.
Cas 1: pas d’obstacle devant le capteur [la LED est éteinte] [Signal capteur = état haut].
Cas 2: le capteur détecte un obstacle [la LED est allumée] [Signal capteur = état bas].
Possibilité d’activer ou désactiver la détection d’obstacle par le microcontroleur à l’aide de la broche ENABLE. La détection est activée par défaut sur le capteur. Si vous souhaitez modifier cela, il faut enlever au préalable le cavalier vert pour pouvoir utiliser l’option ENABLE.
Mots clés: avoid, avoidance, sensor, collision, prevention, éviteur.