{kind=link}
Description
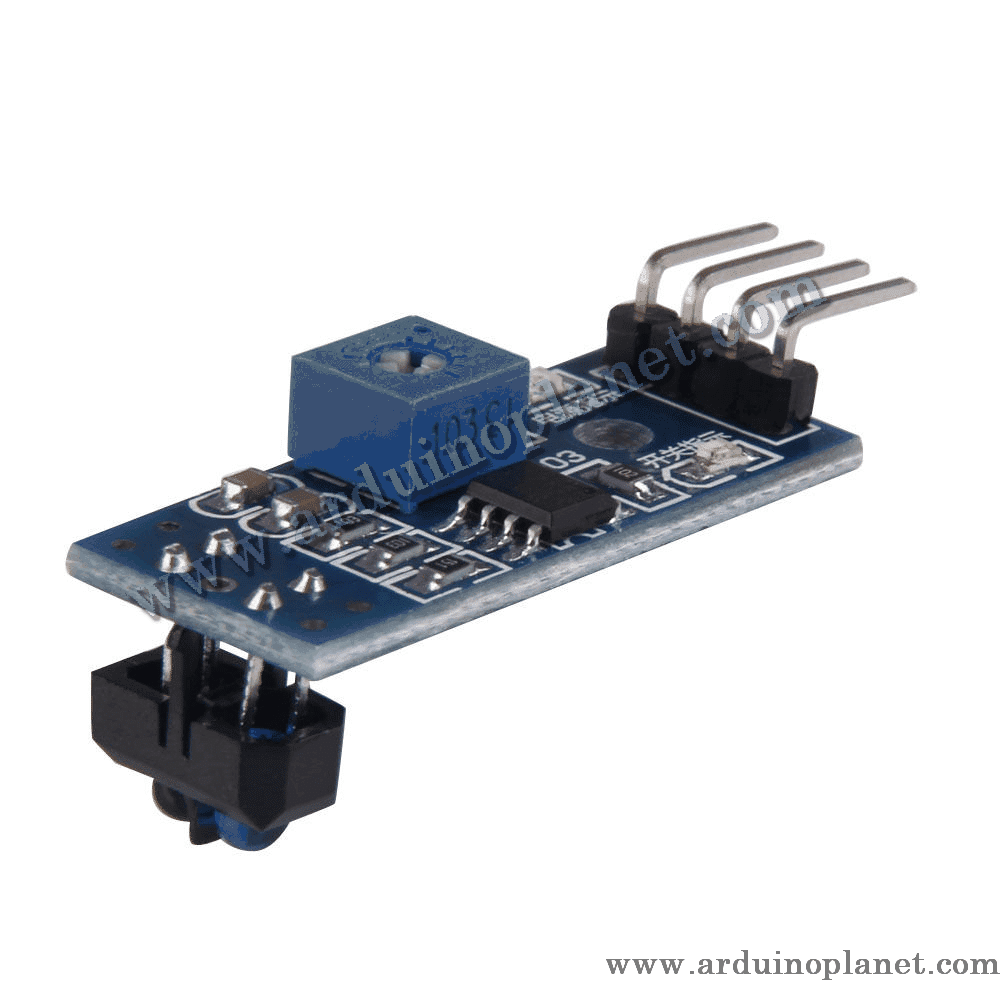
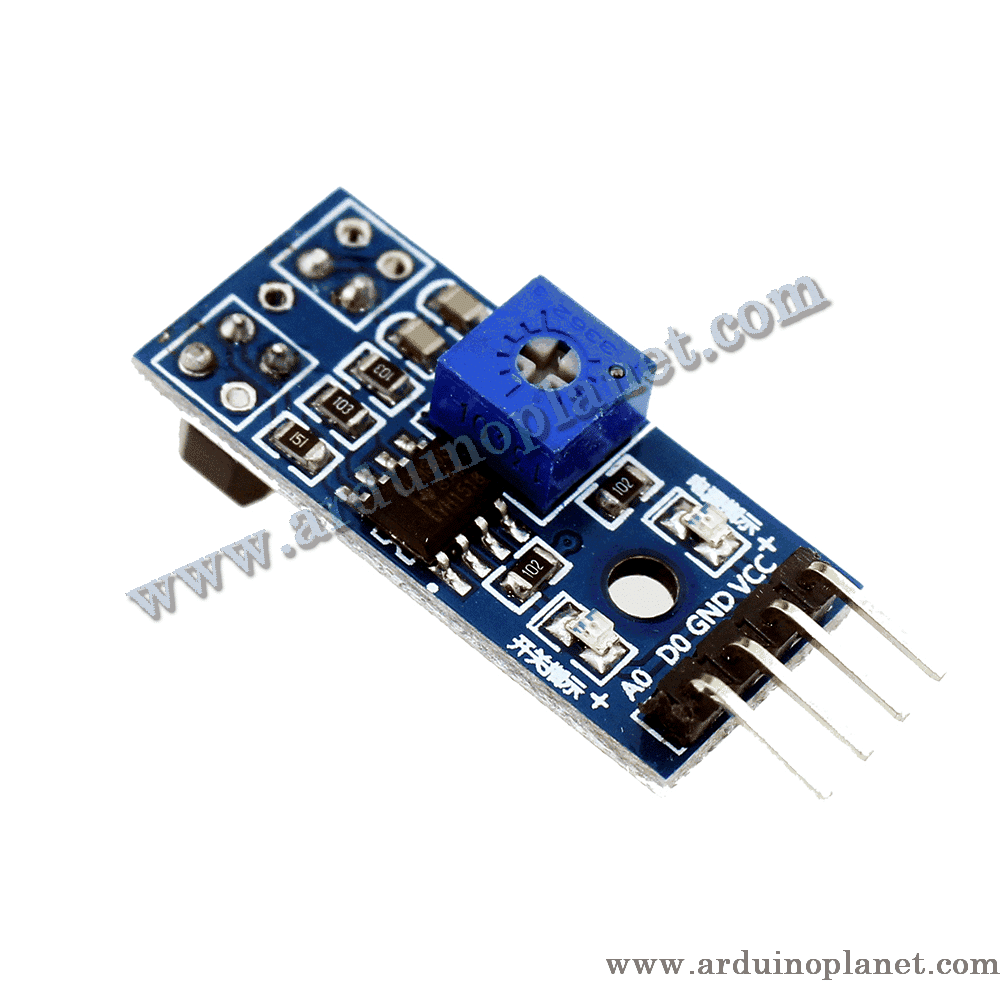
Module Infrarouge IR Détecteur D’obstacle TCRT5000
Ce capteur TCRT5000 est un détecteur d’obstacle de haute précision, ayant une paire d’infrarouge émetteur et récepteur, pour la détection d’un obstacle.
- Modèle : TCRT5000
- Tension de fonctionnement : DC 3.5-5 V
- Sortie : 0/1 ; Distance de détection : 1-25 mm, distance focale : 2,5 mm
- Puce : lm393
Mots clés: sensor, obstacle, infrared, évitement.