{kind=link}
Description
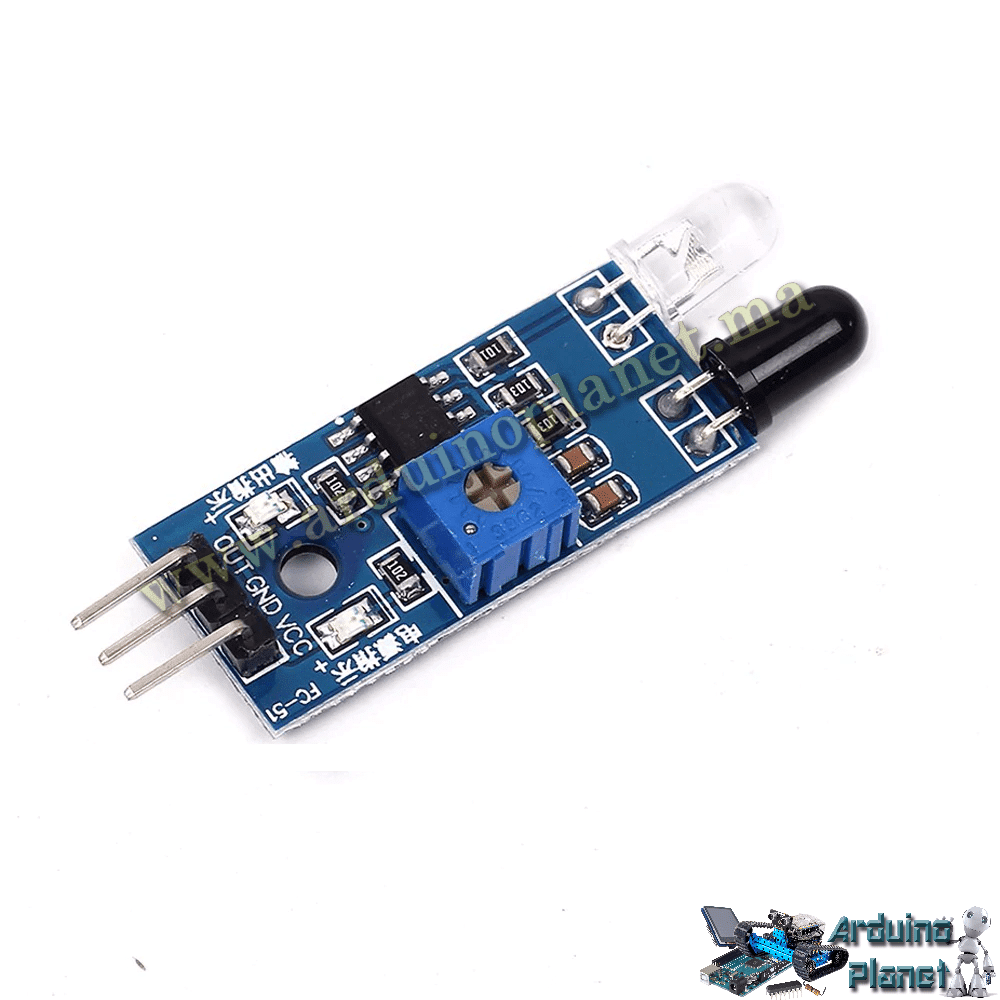
Module Infrarouge IR Détecteur D’obstacle
Module détécteur d’obstacle à Infrarouge. Lorsque le module détecte un obstacle, le voyant vert s’allume et déclenche le port de sortie du signal de sortie. Le module peut détecter une distance de 2 à 30 cm et un angle de détection de 35 °. Ajustez la sensibilité en utilisant le potentiomètre. Peut être utilisé pour les modules d’alimentation 3-5V DC. À la mise sous tension, le témoin rouge d’alimentation s’allume.
- VCC: tension externe 3,3V-5V (peut être directement connecté à 5v MCU et 3,3v MCU)
- GND: GND externe
- OUT: interfaces de sortie numérique (0 et 1)
Mots clés: infrared, avoidance, tracker, line, évitement.