{kind=link}
Description
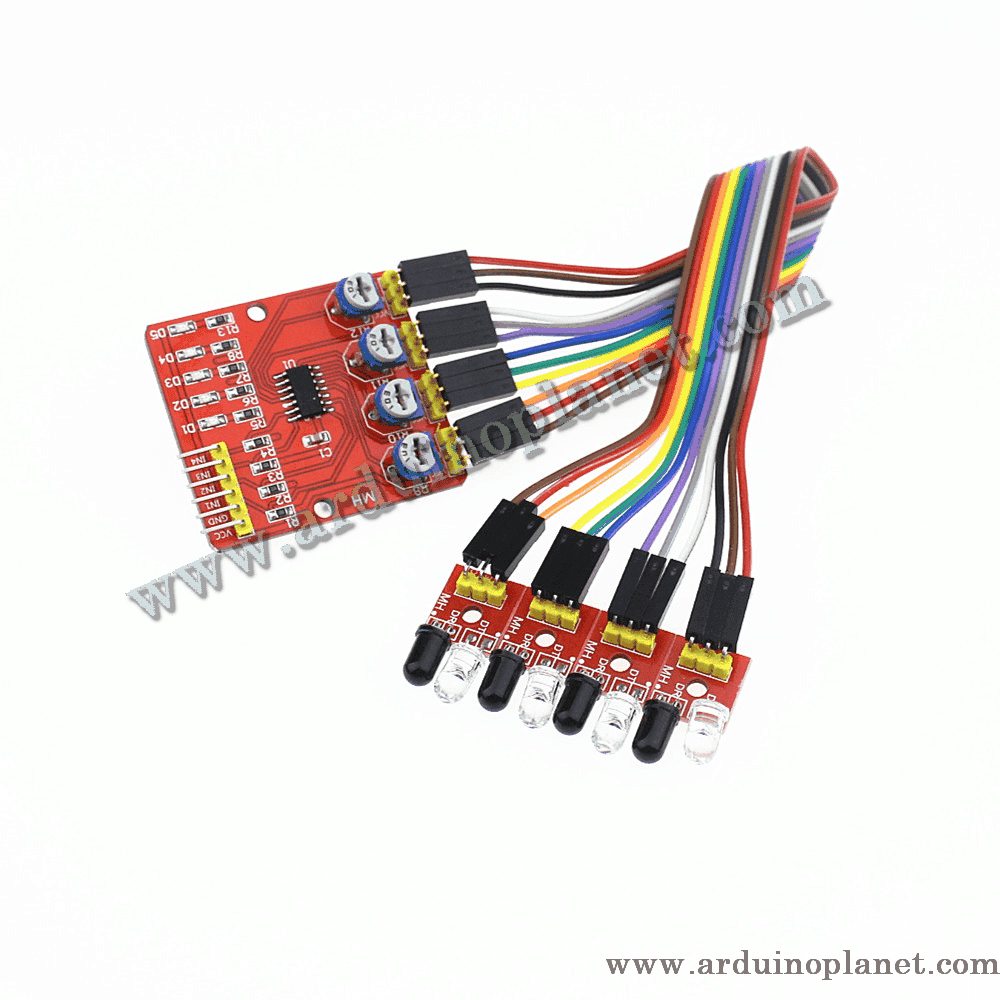
Module Suiveur de ligne 4 Voies:
Module suiveur de ligne 4 voies infrarouge composé d’une plaque centrale et de 4 modules de detection infrarouge.
- Dimensions de la carte centrale: 44mm*40mm*12mm
- Dimensions du capteur infrarouge: 25mm*12mm*12mm
- Tension d’alimentation: 3.3 ~ 5 V DC
- Temperature de fonctionnement: -10 ~ +50 °C
- Distance de detection: 1mm ~ 60cm
Applications:
- Robot suiveur de ligne
- Robot évitant les obstacles
Mots clés: sensor, obstacle, infrared, follower, tracker, tracking, line, quad.