{kind=link}
Description
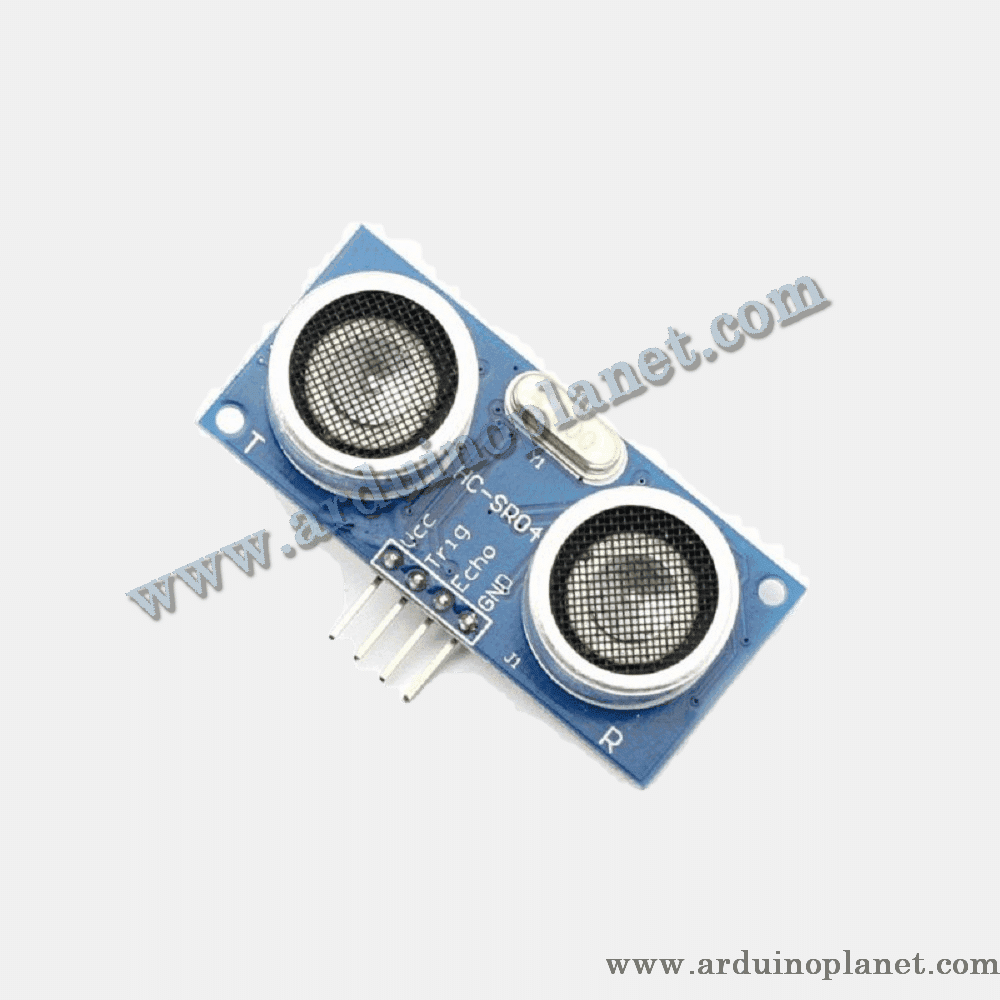
Module Ultrasonique Détection de Distance HC-SR04
Ce capteur de distance à ultrasons HC-SR01 permet des mesures de distance allant de 2cm à 400cm avec une précision pouvant aller jusqu’à 3mm. L’angle du cône de mesure est d’environ 15°. Le sonar HC-SR04 comprend un émetteur ultrasons, un récepteur ultrasons ainsi qu’un circuit de contrôle, il suffit d’envoyer une impulsion de 10 µs en entrée et le capteur renvoie une largeur d’impulsion proportionnelle à la distance.
Les 4 broches de connexion correspondent à:
- Alimentation 5V
- Déclencheur de pulsation (entrée)
- Echo pulsation (sortie)
- 0V (masse)
- Alimentation: 5 Vcc
- Consommation: 15 mA
- Fréquence: 40 kHz
- Portée: de 2 cm à 4 m
- Déclenchement: impulsion TTL positive de 10µs
- Signal écho: impulsion positive TTL proportionnelle à la distance.
- Calcul: distance (cm) = impulsion (µs) / 58
- Dimensions: 45 x 21 x 18 mm
Mots clés: ultrasonic, ranging, range, sr04, sensor.