{kind=link}
Description
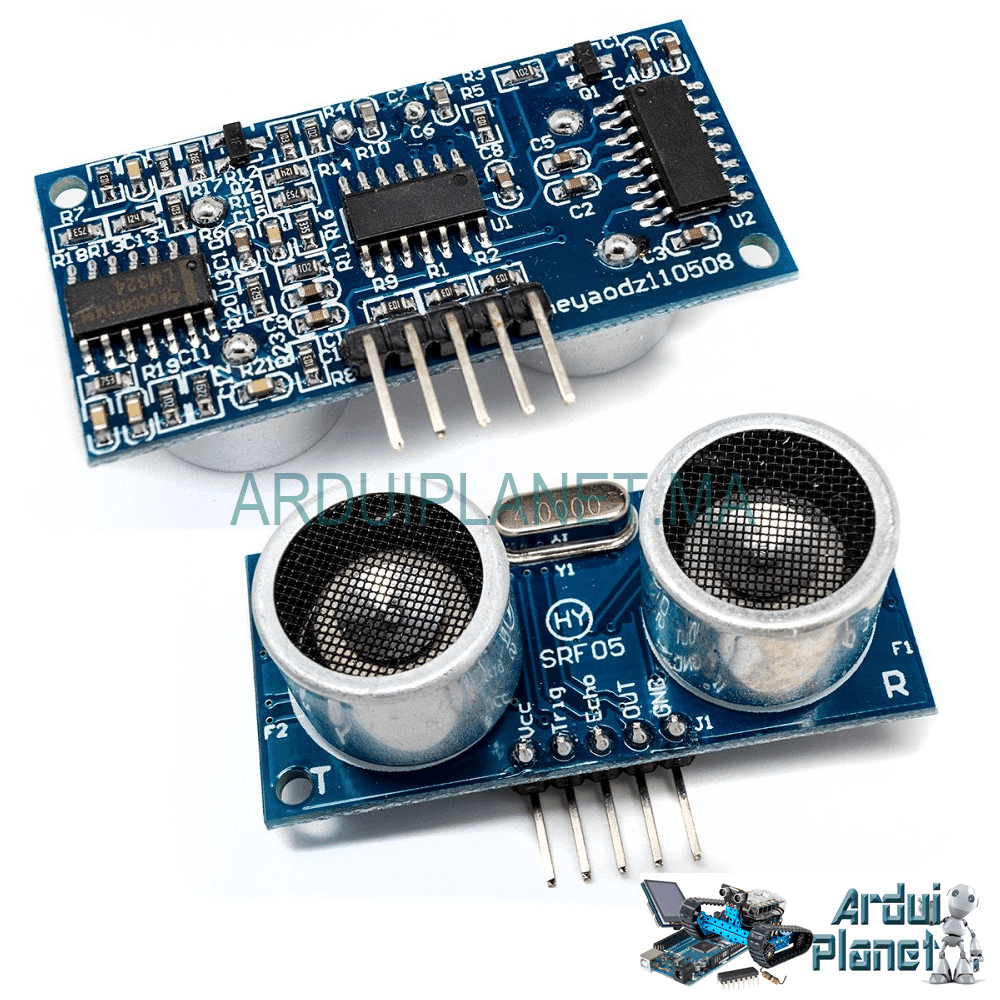
Module Ultrasonique Détection de Distance HY-SRF05
Ce module Ultrasonique HY-SRF05 permet d’évaluer les distances entre un objet mobile et les obstacles rencontrés. La portée effective se situe entre 1 cm et 4 m. Le mode de fonctionnement permet d’utiliser une seule broche pour les signaux trigger et echo.
- Alimentation: 5 Vcc.
- Consommation: 4 mA nominal.
- Fréquence: 40 kHz.
- Portée: de 1 cm à 4 m.
- Modes: broche unique pour trigger et echo ou sorties séparées.
- Déclenchement: impulsion TTL positive de 10µs.
- Signal écho: impulsion positive TTL proportionnelle à la distance.
- Dimensions: 43 x 20 x 17 mm.